Avoidance
To navigate successfully in complex environments, efficient locomotor control is required. Zebrafish larvae move with discrete bouts of propulsion generated by tail movements. While these movements have many consistent features, the dynamical properties of individual bouts are flexible to adapt to different behavioral contexts. Neural populations in the hindbrain integrate upstream sensory information and control the dynamics of propulsion. We are interested in understanding the mechanism by which distributed networks in the hindbrain generate and control these dynamics. In this project, we will develop generative models that can capture the diverse repertoire of movements. These models will provide insight into how the brain controls different movements, and can help us to interpret population neuronal activity recordings.
Publications
- (poster) Thomas Soares Mullen, Adrien Jouary, Alexandre Laborde, Edite Figueiras, Joaquim Contradanças, Michael Orger [2022]. A head-fixed assay for larval zebrafish to study state changes across multiple timescales.
- Marques JC, Lackner S, Félix R, & Orger MB† [2018]. Structure of the Zebrafish Locomotor Repertoire Revealed with Unsupervised Behavioral Clustering. Current Biology, 28(2). 181-195.
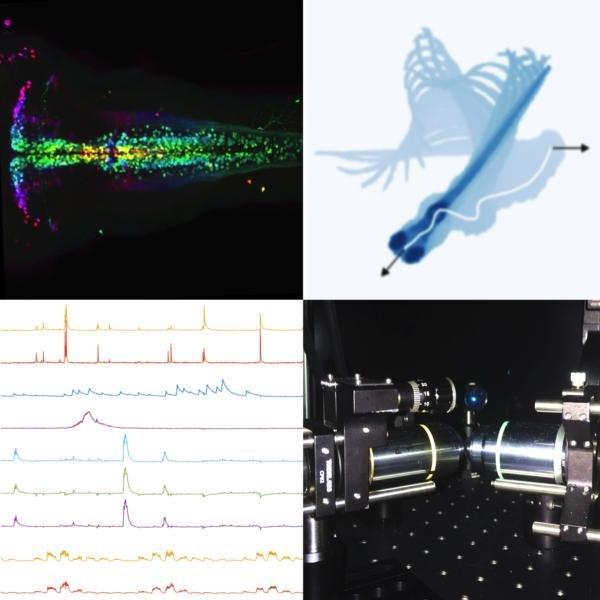
- Bouchard, M. B., Voleti, V., Mendes, C. S., Lacefield, C., Grueber, W. B., Mann, R. S., et al [2015]. Swept confocally-aligned planar excitation (SCAPE) microscopy for high speed volumetric imaging of behaving organisms. Nature Photonics, 9(2), 113–119.

